Taiwan
Displaying present location in the site.
改革機器人學的「狀況因應遠端遙控技術」
解決因通訊延遲而產生的機器人控制課題
機器人學(Robotics)在勞動力不足、產業界提倡生產性革命的背景之下,逐漸擴大運用領域,獲得進一步成長。近年來除了提升機器人性能的研究開發之外,也開始著手研究運用Wi-Fi®等無線網路,從遠端協調並控制各式各樣機器人的方式。另一方面,NEC正在積極研發的IoT平台,將等同機器人大腦的演算法、運算基礎都架設在雲端側※1,掌管視覺、聽覺等感應器部份則設置在機器人周圍。希望能作為機器人學的新模型,並加速推動普及。
運用無線網路的遠端遙控方式,能以較低成本大幅提升機器人的性能,但另一方面,來自其他機器人與周遭loT機器的電波干擾與雜訊也會增加,因此常會發生通訊延遲的情況。一旦通訊延遲,機器人發出的數據與伺服器發出的控制指令,將無法如時到達,導致機器人動作不穩定,產生難以正確協調控制的課題。
基於上述課題,NEC著手開發「狀況因應遠端遙控技術」,該技術能高精確度預測無線IP通訊中的通訊延遲,並根據預測執行先行控制,藉此達成機器人的穩定動作。
NEC目前將工廠、倉庫內所使用的自動運送機器人、警衛機器人以及無人機等,預設為可運用本項技術的領域。這類機器人、機器需要以10〜100msec※2左右的高頻率進行細微控制,因此通訊延遲所產生的停滯時間(Dead Time)※3,與FA(工廠自動化)機器人等相比,更是影響甚鉅。「狀況因應遠端遙控技術」便是藉由高精確度且即時執行控制,來排除因通訊延遲而引發的課題,可望有助於提升業界產能。此外,本技術在確保機器人運轉空間的安全性上,同樣扮演著重要角色。
※1 除了雲端型基礎之外,亦在工廠、倉庫等內部建架用於控制的伺服器,也可在本地系統建構機器人的基礎。
※2 msec為時間單位之一,即1000分之1秒,10〜100msec即為100分之1秒〜10分之1秒。
※3 機器人平台(或稱控制伺服器)與機器人之間所進行之「來回」通訊延遲合計。

成功以高精確度協調控制多台自動運送機器人
而NEC更與世界No.1的綜合馬達製造商日本電產,攜手展開以自動運送機器人為對象的共同開發,以作為推動「狀況因應遠端遙控技術」普及化的措施之一。
兩家公司的目標,是確立可從遠端高精確度地控制多台自動運送機器人的技術。日本電產擁有可藉由使內建小型電腦的智慧馬達®之間進行密集溝通,進而促使搭載該馬達的複數機器人之間,達到高精確度同步的技術。
而NEC則可以運用「狀況因應遠端遙控技術」,在考量無線網路的通訊延遲後,正確預測多台自動運送機器人所搭載的智慧馬達®狀態。接著根據此項預測,執行電壓及迴轉數的先行控制,成功對多台自動運送機器人實現高精確度且即時的遠端遙控。
如果是其他公司進行的傳統遠端遙控水準,考量到通訊延遲,必須大幅降低運送機器人的運轉速度。相反地,若將NEC與日本電產成功研究出的技術成果套用在物流現場,就能讓運送機器人流暢行動,預估可提升約30%左右的運送效率。除了成本較高的大型、高輸出的自動運送機器人之外,還可藉由與多台廉價小型運送機器人倂用,能夠因應不同對象的形狀與重量,建構出靈活的運送體制。就結果來看,本技術將能有助於降低運轉成本,也能削減不必要的電力消耗。
NEC今後也會持續在loT通訊領域推動研究開發,為解決勞動力不足問題、提升生產性以及節省能源等方面有所貢獻。
※下方兩張圖片即為NEC於2018年8月公布的小型運送機器人試作機。由於機器人不再需要搭載過去昂貴的控制用電腦,因此能以低成本進行導入。


事先預想通訊延遲,實現即時控制的核心技術
支援「狀況因應遠端遙控技術」的關鍵基礎技術,便是「通訊延遲預測技術」。藉由高精確度預測通訊延遲,感應器與馬達所傳來的位置、速度以及扭矩等資訊,能夠清楚掌握是幾秒之前的資訊,進而正確掌握機器人現在的狀態。只要在控制指令送達的時間點,能夠高精確度預測機器人是處於何種狀態,就能傳送最適合該狀態的指令。NEC的「通訊延遲預測技術」與同類型的研究成果相比,能夠改善約30%的通訊延遲預測誤差。
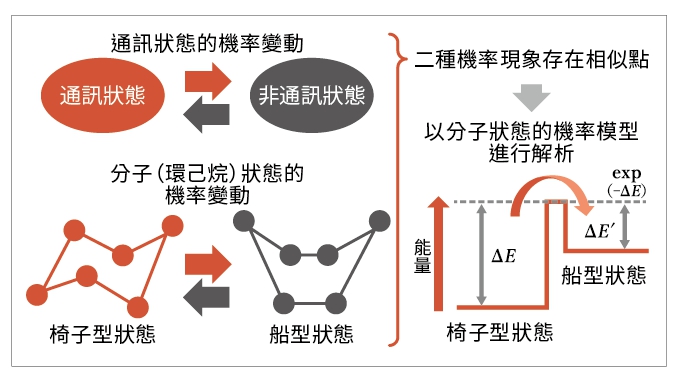
此外,本技術之所以能夠實現,是因為在分析眾多通訊延遲數據與樣式的過程中,也應用到統計物理學上所使用的某分子狀態的機率模型*。NEC的研究人員發現,通訊網路中的延遲發生機制,與某分子的狀態變動機制,兩者之間存在著許多相似點,而成為本研究開發的開端。(日文版原文發表日期:2018年9月)
*出處:安田,吉田:〈2狀態模型之往返延遲時間預測〉,電子資訊通訊學會IN研究會,2017年9月
研究者簡介
吉田裕志 NEC系統平台研究所主任研究員

十分喜愛並擅長數學,碩士班選擇「微分方程式之穩定解析」作為研究主題,並取得「數學檢定」最高級別1級。進入NEC後,主要從事多媒體播放技術的研究開發,2010年之後,將重心擺在通訊流量預測技術,為了「預測」所需的數學手法而學習了先進的金融工學,運用在「經濟時序解析」,取得獨樹一格的業績。2016年取得博士學位。興趣是從中學時代持續至今的足球,每個週末都會去踢室内五人制足球。
熊谷太一 NEC系統平台研究所主任

大學時代就讀電子工學系,主修天線與電波傳遞,曾進行數位無線電視電波實測的田野調查等。碩士班主修資訊網路系統學,主要研究汽車(ITS)專用路由協定等。進入NEC後,負責研究行動電話基地台運用自動化的Self Organizing Network(SON),近年來,則是運用無線網路遠端遙控移動機器人等相關研究。興趣是從國小至今未曾中斷的足球。出社會後,開始跑馬拉松,曾經跑完全馬,也挑戰過跑山路的山徑越野跑。